Научная статья
Аннотация: В работе предложено применение морских мобильных роботов для противодействия минированию, обнаружения, классификации и локализация мин. В соответствии с предназначением выделены поисковые и разведывательные роботы для обследования акваторий, которые способны действовать автономно или в режиме телеуправления с поддержкой принятия решений. Проведен анализ возможностей существующих типов сенсорных систем для обследования акваторий. Представлены основные результаты теоретических и экспериментальных исследований возможных направлений совершенствования магнитометрических сенсорных систем для морских роботов. Предложено, исходя из критерия обеспечения наибольших возможностей морских роботов по обнаружению и темпу ведения поиска в автономном режиме, при известных массогабаритных ограничениях, построение магнитометрической сенсорной системы с автоматизированным распознаванием взрывоопасных объектов. Для целей автоматизированной классификации объектов поиска предложено воспользоваться преимуществом нейронных сетей, которые, в отличие от традиционного машинного обучения, обеспечивают возможность высокоуровневого абстрактного выражения семантики внутренних связей между данными посредством выбора вариантов архитектурных решений. Получена структура нейронной сети на основе линейной классификации взрывоопасных объектов по двум параметрам обучающей выборки. На основе проверенной обучающей выборки и классифицирующей функции по двум параметрам, для многоканальной магнитометрической системы разработана реализация структуры нейронной сети, учитывающей, кроме ферромагнитной массы и глубины залегания, параметры геометрической формы реальных взрывоопасных объектов. Определены направления совершенствования и увеличения дальности действия феррозондовых сенсоров, как наиболее подходящих для построения магнитометрических систем обнаружения морских мобильных роботов. Предложен способ повышения чувствительности феррозондовых магнитометрических сенсоров морских роботов за счет применения новых магнитных материалов и схемотехнических решений. Для создания высокочувствительных феррозондовых магнитометрических сенсоров предложено применение сердечников из аморфных сплавов на основе кобальта типа АМАГ 170, обеспечивающих потенциальную возможность повышения коэффициента преобразования (чувствительности) сенсорной системы за счет увеличения частоты возбуждения сердечника феррозонда. Представлена функциональная схема макета разработанной магнитометрической феррозондовой сенсорной системы на основе двух стержневых сердечников из аморфного сплава АМАГ 170.
Морские роботы; сенсорные системы; поиск морских мин; магнитометрия; феррозонд; феррозондовые преобразователи магнитного поля; магнитометр.
Введение
В настоящее время во всех странах идет активная разработка морских мобильных надводных и подводных роботов. Так США с 2017 г. в ВМС принята концепция «Призрачный флот», согласно которой беспилотники будут синхронно взаимодействовать, и выполнять боевые задачи. Осуществление данной концепции будет означать серьезные изменения в строительстве и применении флота. В России также усилия направлены на разработку автономных необитаемых подводных аппаратов-роботов с использованием в их системах управления элементов искусственного интеллекта [1].
В соответствии с предназначением можно выделить поисковые и разведывательные устройства для обследования акваторий, которые способны действовать автономно или в режиме телеуправления с поддержкой принятия решений.
Одной из основных задач подобных устройств будет противодействие минированию, обнаружение, классификация и локализация мин. Успешность выполнения данной задачи будет в свою очередь определяться номенклатурой применяемых сенсорных систем, таких, как: оптические, гидролокационные и датчики различных физических полей [2].
Состояние вопроса
Применение морских мобильных роботов позволяет или полностью исключить, или существенно снизить опасное воздействие на человека мероприятий по поиску взрывоопасных предметов (ВОП), а также вредных факторов глубоководных работ [3].
На морских мобильных роботах, как правило, устанавливается полный комплекс систем и устройств, обеспечивающих самостоятельное движение. Для применения под водой, большинство из них имеют торпедообразную форму корпуса, оснащены энергетической установкой, состоящей из аккумуляторной батареи и гребного электродвигателя (рис. 1) [4].

Рис. 1. Внешний вид подводного морского робота
Движение морских роботов при обследовании акваторий с целью обнаружения ВОП должно осуществляться по траектории связанных галсов, обеспечивающих перекрытие зон обнаружения сенсоров и охват всей обследуемой площади (рис. 2,а).
Как правило, бортовые системы обнаружения морских мобильных роботов включают оптические и гидролокационные сенсоры (локаторы бокового и курсового обзора, профилограф и т.п.). Которые достаточно хорошо обеспечивают обнаружение объектов в относительно благоприятных условиях среды. Например, расположенных в толще воды (между поверхностью и дном). Это наиболее прострой случай, поскольку исключается влияние шума, возникающего при отражении волны от дна и объектов, расположенных на дне, на результат. Однако наличие помех значительно снижает достоверность результатов визуального осмотра дна и гидролокации, так как искомые объекты в момент проведения обследования могут быть полностью или частично укрыты, например, донными отложениями, покровом водорослей, и т.п. [5] (рис 2,б).
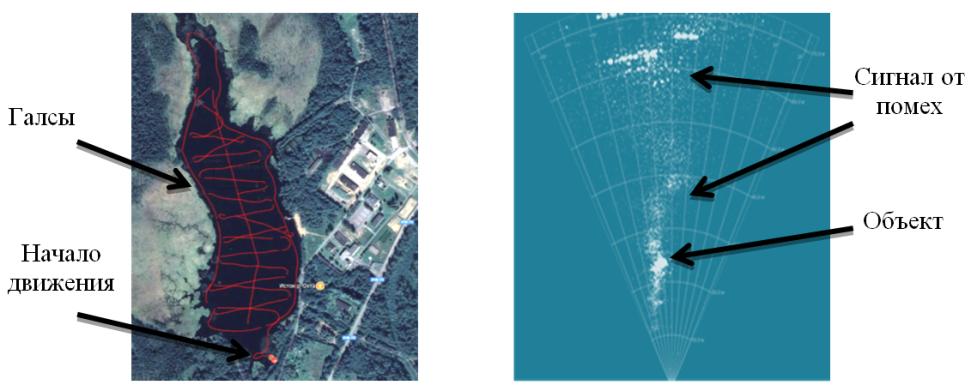
Рис. 2 Пример обследования акватории в сложных условиях:
а – траектории галсов; б – экран гидролокатора курсового обзора
Среди существующих методов обнаружения скрытых объектов можно выделить метод измерений магнитных аномалий естественного магнитного поля Земли, который широко применяется в задачах геофизических и радиофизических исследований, и позволяет обнаруживать ВОП по косвенным признакам в условиях оптических и гидроакустических помех [6, 7].
Актуальность применения метода измерений магнитных аномалий при обследовании акваторий морскими мобильными роботами обусловлена наличием у большинства (не менее 85 %) морских и противодесантных мин, а также других возможных взрывоопасных предметов ферромагнитного корпуса или ферромагнитных компонентов в конструкции [3]. Несмотря на то, что известные магнитометры имеют высокий уровень технических характеристик, еще остаются направления их совершенствования, такие, как:
- применение новых методов обработки сигналов, в том числе с применением алгоритмов, обеспечивающих распознавание объектов поиска.
- применение новых конструкционных материалов при разработке чувствительных элементов первичных преобразователей магнитного поля;
- применение новых схемотехнических решений при разработке электронных схем сенсоров.
Применение новых методов обработки сигналов. Возможности магнитометрического метода поиска любого взрывоопасного предмета ограничены наличием в его оболочке ферромагнитного материала (чем больше, тем лучше), поэтому не все предметы обнаруживаются с хорошей достоверностью. Потенциально обнаруживаются с высокой долей надежности фугасы, противодесантные или морские мины, авиационные бомбы, крупнокалиберные снаряды и минометные боеприпасы (не менее 76 мм), и т.д. [8]. На рис. 3 показаны характерные объекты поиска [9, 10].

Рис. 3. Характерные объекты поиска
Для целей автоматизированной классификации объектов поиска при выполнении задач противодействия минированию, обнаружения, классификации и локализации мин морскими мобильными роботами следует воспользоваться преимуществом нейронных сетей, которые, в отличие от традиционного машинного обучения, обеспечивают возможность высокоуровневого абстрактного выражения семантики внутренних связей между данными посредством выбора вариантов архитектурных решений [11]. Классификация ВОП по величине зарегистрированного полезного сигнала и вычисленного (на его основе) магнитного момента, глубины залегания и параметров формы (разнос экстремумов амплитуд сигналов) для «больших» предметов, например, авиабомб или морских мин, и т.п. обладает достаточной достоверностью и может быть на уровне 0,9…0,95 [12].
На основе полученной обучающей выборки (табл. 1) и классифицирующей функции по двум параметрам, для многоканальной магнитометрической системы возможна реализация структуры нейронной сети, учитывающей, кроме ферромагнитной массы и глубины залегания (проникновения в грунт), параметры геометрической формы реальных объектов поиска [13].
Таблица 1 - Полученные усредненные значения статистических данных ВОП
|
Магнитный момент, |
Глубина залегания (в грунт), |
Длина, |
|---|---|---|
|
0,18 |
0,10 |
0,2 |
|
0,25 |
0,40 |
0,33 |
|
0,75 |
1,20 |
0,6 |
|
0,90 |
0,20 |
0,3 |
|
1,80 |
2,10 |
1,1 |
|
2,60 |
3,40 |
1,6 |
|
5,00 |
2,30 |
1,1 |
|
9,50 |
3,30 |
1,5 |
|
20,00 |
6,50 |
1,9 |
|
50,00 |
6,80 |
2,5 |
Простая нейронная сеть состоит из одного входного слоя и одного выходного [14]. Базовая структура сети показана на рис. 4. Цель работы сети заключается в том, чтобы научиться предсказывать значения переменной класса для случаев, в которых за ней не осуществлялось наблюдение, и далее проводить классификацию обнаруженных магнитных аномалий по принадлежности к ВОП.
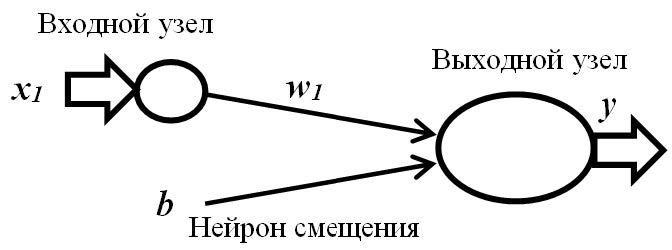
Рис. 4. Базовая архитектура однослойной нейронной сети
В первом приближении для упрощения задания классифицирующей функции на основе обучающей выборки (табл. 1) возможна классификация по двум параметрам. За значение х1 принимается магнитный момент М, Ам2, за значение y – глубина залегания ВОП в грунте, м. Распределение статистических данных обучающей выборки по ВОП для лучшего представления входных данных показано на рис. 5.
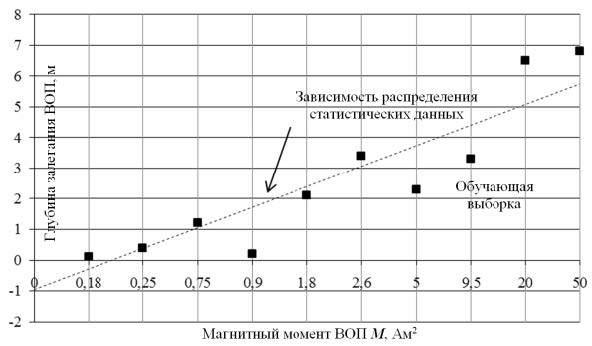
Рис. 5. Полученное распределение статистических данных обучающей выборки
Из рис. 5 следует, что распределение статистических данных имеет линейную зависимость, где данные находятся около значений условной линии. Для однослойной сети набор входов непосредственно транслируется на выход путем использования обобщенного варианта линейной функции [14]:
y = ∑di=1 w1x1, (2)
Задача нейронной сети – провести классификацию ВОП относительно линейной функции, несмотря на то, что данные по всем точкам отсутствуют. Выражение классифицирующей функции по двум параметрам будет иметь вид [14]:
y = w1x1 + b, (2)
где y – предсказанное (расчетное) значение классифицирующей функции, x1 – значение аргумента функции из обучающей выборки, w1 – весовой коэффициент, b – коэффициент смещения функции (на начальном этапе построения сети равен 0).
Первоначальное значение коэффициентов может быть любым, и в программной реализации задается командой установки случайных чисел, а далее производится обучение нейронной сети и корректировка коэффициентов классифицирующей функции. Так для x = 5 из обучающей выборки (табл. 1), при случайном значении w1 = 0,1 и b = 0 получено расчетное значение y = 0,5, однако соответствующее целевое значение из обучающей выборки составляет Y = 2,3.
Для корректировки результата применяется функция ошибки [14]:
E(x) = Y – y. (3)
В данном случае E(5) = 1,8. После определения ошибки E проводится обновление коэффициентов и обучение классифицирующей функции через их взаимосвязь [14]:
W = w + Δw, (4)
где W – искомое значение весового коэффициента, Δw1 – шаг изменения весового коэффициента.
Тогда целевое значение Y классифицирующей функции будет определяться [14]:
Y = (W + ΔW)X. (5)
Отсюда значение ошибки E = Δwx, а изменение весового коэффициента [13]:
Δw = E/x. (6)
При x = 5, w1 = 0,1, E = 1,8 значение изменения весового коэффициента составит Δw = 0,36. Тогда обновленное значение W = w + Δw = 0,46.
Проверка классифицирующей функции после обучения показывает y = Wx = 2.3, т.е., значение функции совпало с искомым значением из обучающей выборки (табл. 1). Далее, на основе определенного изменения весового коэффициента Δw = 0,36, проводится обучение нейронной сети на следующем значении x из обучающей выборки.
Для целевого значения Y = 0,2 при x = 0,9 и определенного Δw = 0,36 расчетное значение классифицирующей функции составит y = wx = 0.324. Т.е., y ≠ Y, и необходим повтор действий по корректировке классифицирующей функции.
После очередного цикла обучения значение ошибки по (3) составит E(0,9) = -0,124, тогда по (6) новое Δw = -0,138, а обновленное значение W = 0,23.
Проверка правильности обучения классифицирующей функции на очередном значении данных из обучающей выборки (табл. 1) показывает, что при обновленных коэффициентах функция определяет в качестве результата значение y = 0,2 = Y, которое и является целевым показателем.
Из приведенных расчетных данных следует, что классифицирующая функция при такой структуре нейронной сети после обучения разделяется по объектам поиска, что в дальнейшем может вносить ошибку классификации ВОП. Поэтому для сглаживания функции вводится коэффициент скорости обучения L, который необходим для исключения скачков данных [14]:
Δw = L(E/x). (7)
Коэффициент L определяется имеющимися вычислительными мощностями и временем обучения нейронной сети. При L = 0,5, x = 5 и w1 = 0,1 прогноз классифицирующей функции на первом шаге останется прежним y = 0,5, однако поправка по (7) составит Δw = 0,18, и тогда W = 0,28. Следовательно, сглаженное значение классифицирующей функции после обучения у(5) = 1,4. Применяя обновленное на первом прогоне W для второго значения обучающей выборки x = 20, получаем y = 5,6. Тогда по (3) ошибка Е = 0,9, расчетное значение по (7) Δw = 0,0225, и обновленное по (4) W = 0,3. Отсюда сглаженная классифицирующая функция после обучения у(20) = 6,05. Начальный, улучшенный и обученный варианты классифицирующей функции показаны на рис. 6.
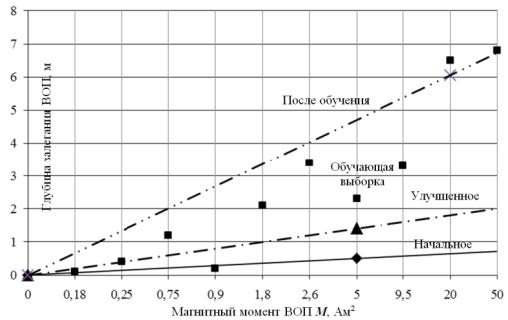
Рис. 6. Полученная эволюция функции классификации ВОП
Полученная структура нейронной сети на основе линейной классификации ВОП по двум параметрам обучающей выборки показывает удовлетворительные результаты. Однако не в полной мере учитывает особенности геометрической формы реальных ВОП и больше подходит для применения в одноканальных магнитометрических системах. Реальные предметы, в том числе ВОП, имеют полюса – положительный, откуда силовые линии выходят, и отрицательный, куда силовые линии входят, здесь концентрация силовых линий максимальная. Следовательно, вблизи этих точек магнитная индукция также максимальная, что и должно выявляться по карте магнитных аномалий. Как правило, полюса располагаются на крайних гранях максимального размера объекта в силу анизотропии формы [3]. Определение местоположения полюсов предмета позволяет уточнить его ориентацию в грунте и оценить геометрическую форму, а значит сделать процесс разминирования более контролируемым. Подобная оценка возможна, если карта магнитных аномалий построена с достаточно высокой точностью, что обеспечивается применением многоканальной магнитометрической системы [15, 16].
На основе проверенной обучающей выборки (табл. 1) и классифицирующей функции по двум параметрам, для многоканальной магнитометрической системы следует применить реализацию структуры нейронной сети, учитывающую, кроме ферромагнитной массы и глубины залегания, параметры геометрической формы реальных объектов поиска. Структура разработанной сети показана на рис. 7.
Для создания алгоритма работы подобной структуры возможно применение метода градиентного спуска для минимизации квадрата ошибки предсказания по отношению к случайно выбираемым тренировочным точкам [17, 18]. Функция классификации ВОП нейронной сетью (рис. 7) по трем параметрам в многоканальной магнитометрической системе будет иметь следующий вид:
у = w1x1 + w2x2 + w3x3, (8)
где y – глубина залегания ВОП, м (в данном случае целевое значение, которое может меняться), х1 – магнитный момент М, Ам2, х2 – длина ВОП, м, х3 – пороговое значение магнитного момента М, Ам2, w1, w2, w3 – весовые коэффициенты.
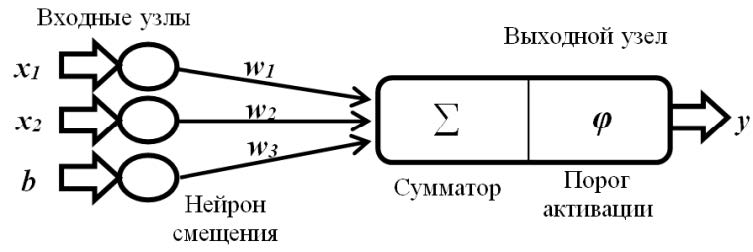
Рис. 7. Структура разработанной нейронной сети классификации объектов поиска в многоканальной магнитометрической системе
При увеличении количества входов данных нейронной сети необходимо задание условия, которое будет согласовывать весовые коэффициенты, уменьшая ошибку E с каждым проходом цикла в алгоритме программы. В случае применения метода градиентного спуска функция ошибки будет иметь вид [19]:
dE / dwij = d(Y – y)2 / dwij (9)
где wij – весовой коэффициент связи нейронов в цепи. Упрощая можно получить dE/dwij = –(Y – y) xi (тут и далее xi – количество входов сети).
Отсюда
Δwij = dE / dwij. (10)
Аналогично
W = wij – L(dE / dwij). (11)
Сумматор (рис. 6) агрегирует все входные сигналы во взвешенную сумму, далее для ее обработки применяется функция активации по порогу превышения М от уровня магнитного мусора [14].
Разработанный алгоритм классификации ВОП нейронной сетью (рис. 7) по трем параметрам в зависимости от данных по магнитному моменту, глубине залегания и параметров геометрии формы, показан на рис. 8.
Алгоритм позволяет основе проверенной обучающей выборки предсказывать значения переменной класса для случаев, в которых за ней не осуществлялось наблюдение и далее проводить классификацию входных данных по принадлежности к ВОП.
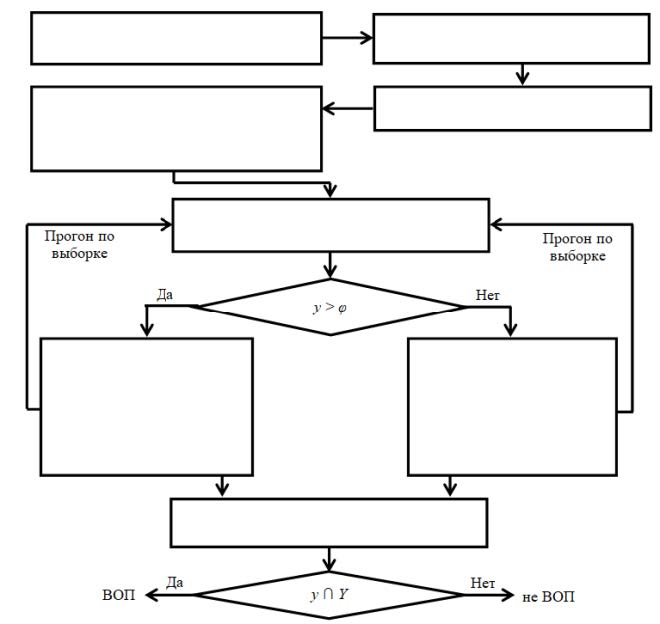
Рис. 8. Разработанный алгоритм классификации ВОП нейронной сетью в многоканальной магнитометрической системе
Для работы алгоритма нейронной сети данные, на начальном этапе обучения, могут подаваться из массива обучающей выборки для типовых объектов поиска или вводится непосредственно в «полевых» условиях путем запоминания параметров, обнаруженных ВОП при выполнении поисковых задач.
Применение новых конструкционных материалов
Анализ существующих типов преобразователей магнитного поля показал, что наиболее походящими для построения магнитометрических сенсорных систем для морских мобильных роботов по совокупности характеристик являются феррозондовые. Они обладают более высокой надежностью и стойкостью к внешним воздействиям, меньшей себестоимостью (по сравнению с другими типами датчиков) ввиду технических и технологических особенностей производства данных изделий [19]. При том, что информационный сигнал феррозондового датчика содержит данные о величине и направлении действия вектора измеряемого магнитного поля.
При разработке магнитометрических сенсорных систем для морских мобильных роботов необходимо обеспечить максимальную дальность обнаружения, которая в общем случае определяется их чувствительностью [7].
Повышение чувствительности возможно за счет применения новых магнитных материалов и схемотехнических решений. Известно выражение характеризующее зависимость параметров дифференциального феррозонда от характеристик магнитопровода [20]
E2 = 4 ω S N2 H0 μ0 μ2, [мВ], (12)
где E2 – амплитуда напряжения в сигнальной обмотке, охватывающей оба сердечника [мВ], ω – циклическая частота возбуждения сердечника феррозонда [рад/мс], S – поперечное сечение сердечника [мм2], N2 – количество витков вторичной обмотки, Н0 – внешнее поле направленное вдоль сердечников [А/м], μ0 – магнитная постоянная [Гн/м], μ2 – относительная магнитная проницаемость материала сердечника. Из (12) видно, что при прочих равных условиях, например одинаковых конструктивных параметрах феррозонда, всегда имеется резерв повышения его чувствительности (коэффициента преобразования) за счет увеличения частоты возбуждения сердечника. В свою очередь, рабочая частота возбуждения сердечников феррозонда определяется магнитными свойствами материала, из которого они изготовлены.
В течение последних десятилетий объектом интенсивного изучения являются аморфные и нанокрристаллические магнитные сплавы. Они проявили себя как новые перспективные материалы, привлекающие новыми возможностями их практического использования. К числу магнитных материалов с рекордно высокой магнитной проницаемостью, превосходящей проницаемость лучших пермаллоев, и одновременно обладающих высокой прочностью и пластичностью, относятся аморфные магнитомягкие материалы на основе кобальта. Их максимальная магнитная проницаемость достигает значений μмакс = 105…106, коэрцитивная сила НС составляет около 0,002 А/см, а электросопротивление в два-три раза выше электросопротивления пермаллоев [21].
Для оценки параметров и определения оптимального материала для изготовления сердечника испытаны образцы пермаллоевого сплава 80НХС и аморфных сплавов 84КХСР, 82КЗХСР и АМАГ 170 (рис. 9).
Из полученной зависимости (рис. 9) следует, что для создания высокочувствительных феррозондовых датчиков целесообразно применение сердечников из аморфных сплавов на основе кобальта типа АМАГ 170, обеспечивающих работу в полосе частот до 100 кГц, и имеющих потенциальную возможность повышения коэффициента преобразования (чувствительности) датчика за счет увеличения частоты возбуждения сердечника феррозонда.
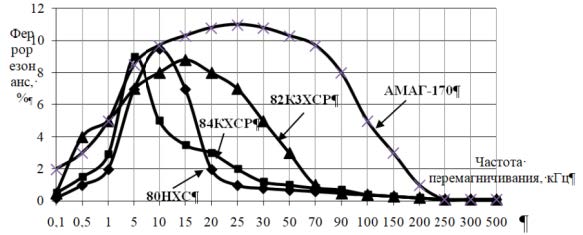
Рис. 9. Экспериментально полученные зависимости величины феррорезонанса от частоты перемагничивания сердечников
Применение новых схемотехнических решений
В настоящее время в схемах возбуждения и преобразования полезного сигнала феррозондовых сенсоров широко применяются электронные усилители напряжения. Однако их применение в целях совершенствования магнитометрических сенсорных систем морских мобильных роботов имеет ряд недостатков (ограничения по снижению массогабаритных, энергетических показателей и т.п.) [22].
При батарейном питании (от 1,5 до 3 В) автономных роботов исключить недостатки, присущие схемам, основанным на усилении напряжения полезного сигнала, позволит применение электронных усилителей тока. Благодаря этому возможно реализовать предельные возможности феррозондовых сенсорных систем [23].
Функциональная схема макета разработанной феррозондовой сенсорной системы на основе двух стержневых сердечников из аморфного сплава АМАГ 170 показана на рис. 10.
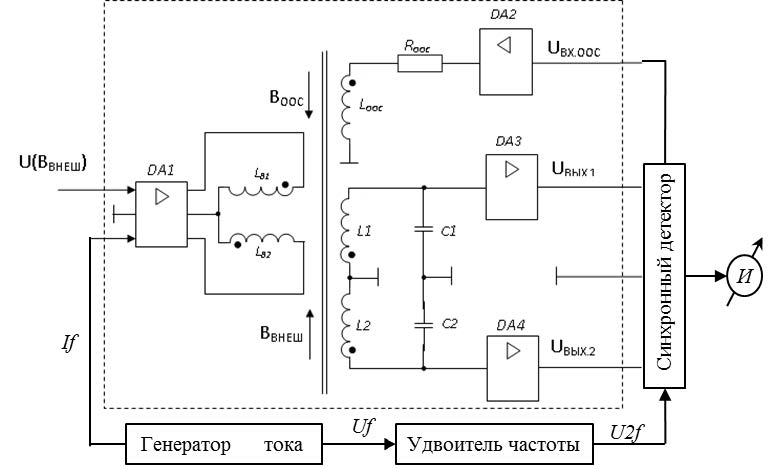
Рис. 10. Функциональная схема разработанной феррозондовой сенсорной системы
Разработанная феррозондовая сенсорная система (рис. 10) состоит из двух сердечников из аморфного ферромагнитного сплава АМАГ 170, усилителя DA1 импульсного тока возбуждения, катушек возбуждения LВ1, LВ2, измерительных катушек L1, L2, конденсаторов С1, С2, образующих измерительный колебательный контур, усилителей тока DA3, DA4, включенных в режиме повторителей напряжения, обмотки отрицательной обратной связи LООС, резистора отрицательной обратной связи ROOC, и усилителя постоянного тока DA2 в цепи обратной связи. Для создания в объеме сердечников магнитного поля обмотки LВ1, LВ2 возбуждаются переменным током через усилитель DA1. Разработанная феррозондовая сенсорная система отличается от известных конструкций [24] применением сердечников из аморфного сплава АМАГ 170 с заданными расчетными размерами 40×2×0,02 мм, и возбуждением их слабым током с использованием глубокой отрицательной обратной связи.
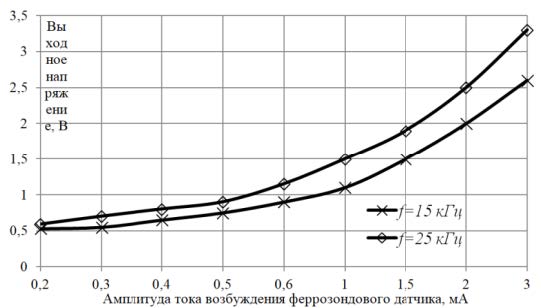
На рис. 11 представлена передаточная характеристика макета разработанной феррозондовой сенсорной системы для различных частот возбуждения сердечников из аморфного сплава АМАГ-170.
Анализ зависимостей, представленных на рис. 11 показывает, что передаточная характеристика разработанной феррозондовой сенсорной системы возрастает при работе на более высокой частоте (f = 25 кГц) возбуждения сердечника.
Заключение
Таким образом, применение морских мобильных роботов для обнаружения, классификации и локализация мин является перспективным направлением их развития. Актуальность применения в аппаратурном оснащении морских роботов магнитометрических сенсорных систем при выполнении задач обследования акваторий обусловлена наличием у большинства (не менее 85 %) морских и противодесантных мин ферромагнитного корпуса или ферромагнитных компонентов в конструкции. Совершенствование магнитометрических сенсорных систем морских роботов возможно по нескольким направлениям:
- применение новых методов обработки сигналов для обнаружения взрывоопасных предметов;
- применение новых конструкционных материалов и схемотехнических решений.
Реализация данных методов позволит повысить чувствительность феррозондовых магнитометрических сенсорных систем и темп поиска. При этом обеспечивает ся автоматизированная обработка поисковых данных и классификации обнаруженных магнитных аномалий по принадлежности к ВОП, что делает процесс поиска более контролируемым и безопасным. Новизна предложенных технических решений подтверждается патентами РФ на феррозондовый магнитометрический датчик № 2757650 [25], и свидетельством РФ на программу для ЭВМ № 2021617334 [26].
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- Дыбов В., Подгорных Ю. Робототехника в вооруженных силах // Арсенал Отечества. – 2021. – № 1 (51). – С. 60-65.
- Быкова В.С., Машошин А.И., Пашкевич И.В. Алгоритм маневрирования автономного необитаемого подводного аппарата при проводке судна через заминированный район // Известия ЮФУ. Технические науки. – 2021. – № 1 (218). – С. 93-101.
- Соколов Н.А. Рычков А.В. Повышение поисковых возможностей автономных необитаемых подводных аппаратов за счет применения многоканальных магнитометрических систем // Известия ЮФУ. Технические науки. – 2021. – № 1 (218). – С. 59-72.
- Центральное конструкторское бюро морской техники «Рубин». – http://ckbrubin.ru/ckb_mt_rubin/ (дата обращения: 05.05.2021).
- Ольховский С.В., Степанов А.В. Магнитометрические разведки в акватории Фанагории // Вопросы подводной археологии. – 2013. – № 1. – С. 53-58.
- Звежинский С.С., Парфенцев И.В. Метод магнитометрического обнаружения взрывоопасных предметов // Специальная техника. – 2008. – № 2. – С. 8-17.
- Щербаков Г.Н., Анцелевич М.А. Новые методы обнаружения скрытых объектов: борьба с терроризмом, гуманитарное разминирование, защита информации, контроль подземных коммуникаций, археология, экология. – М.: Эльф ИПР, 2011. – 503 с.
- Billings S., Pasion C., Walker S., Beran L. Magnetic models of unexploded ordnance // IEEE Transactions on Geoscience and Remote Sensing. – 2006. – Vol.: 44, Issue 8. – P. 2115-2124.
- Системы минирования. АО «НИИИ». – URL: http://aoniii.ru/?page_id=294 (дата обращения: 23.12.2021).
- Минное оружие. АО «Концерн морское подводное оружие – Гидроприбор». – URL: https://gidropribor.ru/production/mines/ (дата обращения: 23.12.2021).
- Келлехер. Дж., Мак-Нейми Б., д’Арси А. Основы машинного обучения для аналитического прогнозирования. Алгоритмы, рабочие примеры и тематические исследования: пер. с англ. – СПб.: Диалектика, 2019. – 656 с.
- Tim Gätcke. Working with Vallon Magnetometers. General Background for Operators and Trainers. – VALLON GmbH: Germany, 2019. – 54 p.
- Детекторы и системы для разминирования. Мины, самодельные взрывные устройства, боевые элементы и неразорвавшиеся боеприпасы. – Энинген. Германия: Валлон, 2021. – 47 с.
- Аггарвал Ч. Нейронные сети и глубокое обучение: учебный курс: пер. с англ. – СПб.: Диалектика, 2020. – 752 с.
- Рычков А.В., Щербаков Г.Н., Соколов Н.А. Рябухин Д.А. К вопросу создания дорожных инженерных разведывательных машин с многоканальными системами обнаружения взрывоопасных предметов // Безопасность жизнедеятельности. – 2021. – № 11. – С. 51-60.
- Соколов Н.А., Шастин И.Д., Рябухин Д.А., Рудаков И.А. Четырехзондовый магнитометрический искатель. Патент Российской Федерации от 30.11.2020 № RU201140U1.
- Паттанаяк С. Глубокое обучение и TensorFlow для профессионалов: пер. с англ. – СПб.: Диалектика, 2020. – 480 с.
- Рашка С., Мирджалили В. Python и машинное обучение. Машинное и глубокое обучение с использованием Python, Scikit-Learn и TensorFlow. – СПб.: Диалектика, 2019. – 420 с.
- Амеличев В.В., Абанин В.В. и др. Развитие технологий магнитополупроводниковых микросистем // Известия ВУЗов. Электроника. – 2015. – Т. 20, № 5. – С. 505-510.
- Власкин К.И. Разработка электромагнитных систем малогабаритных первичных преобразователей феррозондового типа: дисс. … канд. техн. наук. – Ижевск: ИжГТУ им. М.Т. Калашникова, 2014. – 150 с.
- Мушников Н.В., Попов А.Г., Потапов А.П., Лукшина В.А. Нанокристаллические магнитные материалы. Физика магнитных материалов и наноструктур / под ред. В.В. Устинова, Н.В. Мушникова, В.Ю. Ирхина. – Екатеринбург: Институт физики металлов им. М.Н. Михеева УрО РАН, 2020. – 664 с.
- Классификация электронных усилителей. – URL: https://ru.wikipedia.org/wiki/ Классификация_электронных_усилителей (дата обращения: 20.11.2021).
- Рычков А.В., Соколов Н.А., Щербаков Г.Н., Прохоркин А.Г., Фещенко Я.В. Повышение чувствительности феррозондовых преобразователей магнитного поля для переносных магнитометров // Боеприпасы. – 2021. – № 2. – С. 70-76.
- Афанасьев Ю.В. Феррозондовые приборы. – Л.: Энергоатомиздат, 1986. – 187 с.
- Соколов Н.А. Феррозондовый магнитометрический датчик. Патент РФ на изобретение от 19.10.2021 № 2757650.
- Соколов Н.А. Программа обработки сигналов в многоканальном магнитометрическом обнаружителе. Свидетельство РФ на программу для ЭВМ от 13.05.2021 № 2021617334.
Информация об авторах
Статью рекомендовал к опубликованию д.т.н., профессор С.С. Звежинский.
- Соколов Николай Александрович – Федеральное государственное бюджетное учреждение «Центральный научно-исследовательский испытательный институт инженерных войск» Минобороны России; e-mail: cniii_iv@mail.ru; Нахабино, Россия; тел.: 89163658920; с.н.с.
- Рычков Андрей Владимирович – Военный учебно-научный центр Сухопутных войск «Общевойсковая ордена Жукова академия Вооруженных Сил Российской Федерации»; e-mail: cniii_iv@mail.ru; г. Москва, Россия; тел.: 84997665759; д.т.н.; доцент.
Ресурс: Известия ЮФУ. Технические науки (Раздел I. Перспективы применения робототехнических комплексов)