Автор: Фоченков Эдуард Анатольевич - ведущий инженер-конструктор ОАО "МСТАТОР"
Обычно в многоканальных импульсных источниках питания (ИИП) обратная связь по напряжению поступает с одного, наиболее важного выхода, на ШИМ – регулятор. Проблемой многоканальных ИИП является взаимная перекрёстная зависимость выходов. Нагружаем один канал – растёт напряжение в другом и наоборот. Происходит это потому, что в схеме только один ШИМ – регулятор и он не может обеспечить хорошую стабильность напряжения во всех каналах сразу. Для улучшения ситуации применяют различные способы, в частности:
Суммируют напряжение с нескольких каналов и полученный сигнал подают на ШИМ-регулятор. Это позволяет уменьшить взаимное влияние до удовлетворительной величины в несколько процентов.
Применяют линейные регуляторы. В этом случае неизбежно дополнительное выделение тепла, и такие схемы становятся неэффективными при токе нагрузки более 1..2 А.
Применяют независимые импульсные субрегуляторы. Этот вариант более эффективен, но требует значительного усложнения схемы, менее надёжен и увеличивает стоимость ИИП. Наибольшие сложности возникают в сильноточных низковольтных схемах, где велико падение напряжения на активном ключе.
Существует простой способ радикального устранения указанной проблемы – применение в импульсных источниках, имеющих более одного выхода, дросселей магнитных усилителей. Они обеспечивают чрезвычайно точную регулировку каждого независимого выхода, очень эффективны, просты, надёжны и дёшевы. Магнитные усилители (МУ) особенно хорошо подходят к выходам с токами от одного до нескольких десятков ампер, хотя они используются и при более низких токах, там, где чрезвычайно важны хорошая стабильность напряжения и КПД. МУ очень удобны для управления выходным напряжением и током с помощью внешнего сигнала, для построения источников стабильного тока. МУ позволяют легко реализовать раздельную токовую защиту выходов, причём для каждого выхода сделать свой оптимальный порог ограничения тока. Они широко применяются в прямоходовых и двухтактных преобразователях.
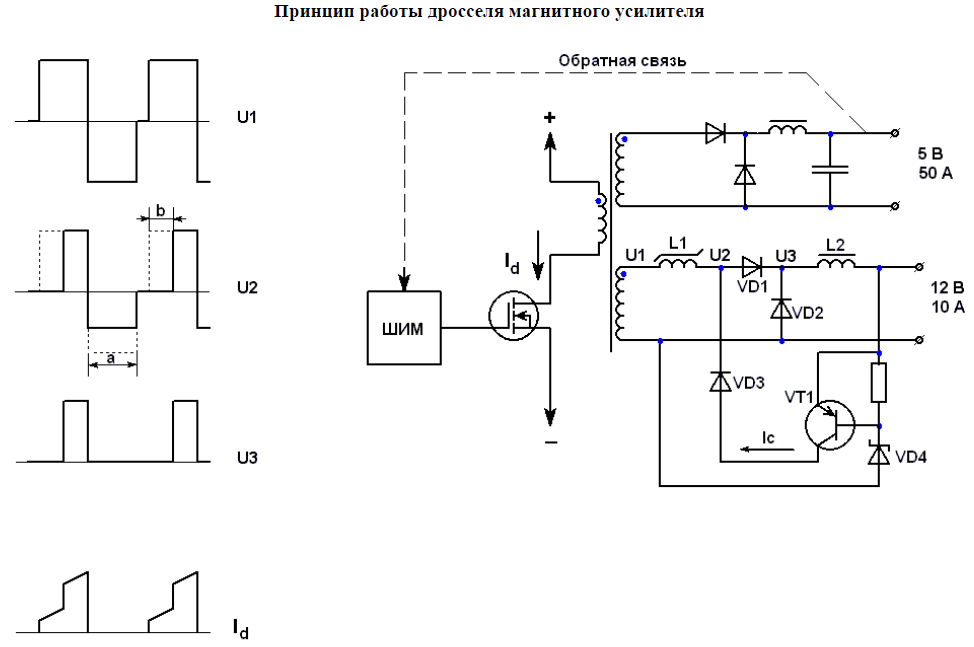
Рис.1 Принцип работы дросселя магнитного усилителя.
МУ контролирует выход ИИП, изменяя ширину импульса, поступающего с вторичной обмотки трансформатора, до того как импульс будет усреднён выходным фильтром. Он делает это, отодвигая передний фронт импульса, как последовательный выключатель, который будет закрыт во время первой части импульса, а затем открыт для передачи импульса на выходной фильтр (См. Рис.1). Функция переключения выполняется насыщающимся дросселем, который представляет собой несколько витков толстого провода, навитых на кольцевой магнитопровод. Магнитопровод имеет очень прямоугольную петлю гистерезиса (до 99%).
В первый момент времени, последовательно включенный дроссель обладает очень большим импедансом и поэтому фактически блокирует передачу импульса с трансформатора на выходной фильтр. Через определённое время задержки b, дроссель МУ резко входит в насыщение, и его импеданс становится практически равен нулю, поэтому оставшаяся часть импульса беспрепятственно передаётся на выходной фильтр. Произведение амплитуды импульса на время задержки (вольт – секундная площадь задержки) определяется потоком магнитопровода и числом витков обмотки. Максимально возможная задержка получается тогда, когда магнитопровод перемагничивается по полному циклу от – Bmax до + Bmax . При этом вольт – секундная площадь задержки будет равна произведению числа витков обмотки на величину двойного (максимального) потока магнитопровода 2Фm:
Но не всегда магнитопровод перемагничивается по полному циклу. Точкой возврата можно легко управлять малым током Ic (ток управления), подаваемым в обратном направлении в обмотку дросселя в момент закрытия силового выпрямителя. В этом случае магнитопровод работает по частному циклу. В одну сторону по петле гистерезиса (ПГ) он намагничивается до полного насыщения Bm, а в другую - до некоторой величины BI, в зависимости от величины тока управления. Таким образом, можно регулировать время задержки b в широких пределах – от 0 (максимальное выходное напряжение) до длительности импульса (полное отключение выхода). Максимальная величина тока управления, достаточная для возврата в состояние насыщения –Bmax, определяется коэрцитивной силой магнитопровода на частоте переключения.
При выходных токах в несколько десятков ампер, ток управления обычно не превышает десятков миллиампер. Поэтому эти устройства и называют магнитными усилителями. Малым током управления объясняется высокая надёжность и эффективность устройств с МУ. В сильноточной цепи находится только обмотка дросселя, все элементы управления находятся в слаботочной цепи, поэтому они малогабаритны и дёшевы. Иногда вместо термина МУ применяют термин «магнитный ключ», т.к. переключение происходит очень резко, с крутым фронтом. Это объясняется формой петли гистерезиса. На боковых ветвях B-H характеристики дифференциальная магнитная проницаемость для аморфного сплава очень велика, поэтому велик и импеданс, пока магнитопровод не войдёт в насыщение. Высочайшая прямоугольность ПГ обеспечивает очень резкий переход в насыщение и крайне низкую дифференциальную магнитную проницаемость на участке насыщения. За счёт этого на участке насыщения дроссель имеет ничтожный импеданс и беспрепятственно пропускает входной импульс на выпрямитель.
Есть ещё одна положительная особенность источников питания с применением МУ. На Рис.1 видно, что ток Id через силовой транзистор преобразователя в первый момент времени мал, т.к. нагрузка фактически отключена дросселем МУ. В этот момент времени ток Id определяется током холостого хода трансформатора. Это приводит к росту КПД преобразователя, поскольку на фронтах включения/выключения транзистор находится в активном режиме, и в нём выделяется значительная энергия. Потери энергии в самом дросселе МУ складываются из потерь на перемагничивание и потерь в обмотке и обычно не превышают 1..2 Вт.
Расчёт дросселя магнитного усилителя
Перед началом разработки дросселя необходимо определить цель – только регулировка и поддержание нужного напряжения на выходе или то же с возможностью отключения выхода. Если выход должен быть защищён от короткого замыкания в нагрузке путём ограничения тока или нужно обеспечить стабилизацию выходного тока, то обязательно дроссель должен быть рассчитан для отключения выхода.
1. Определение требуемой вольт – секундной площади задержки:

V – амплитуда импульса, поступающего на дроссель, В;
t – максимальная требуемая задержка переднего фронта импульса (b на Рис.1), мкс;
1.2 – коэффициент, учитывающий переходные процессы при включении и снижение индукции материала при нагреве.
2. Определение требуемой величины произведения WaAc (Wa – площадь окна (по внутреннему диаметру) сердечника, Ac – эффективная площадь поперечного сечения магнитопровода).
2.1. Грубая оценка диаметра провода на основе выходного тока.
d – диаметр провода, мм;
I – выходной ток, А.
Диаметр провода выбирают в зависимости от условий охлаждения. Для принудительной конвекции может быть выбран более тонкий провод. Полученная величина диаметра провода далее уточняется более точным расчётом исходя из допустимого перегрева, который обычно принимается равным 20…30º С. Важно, чтобы при максимальной температуре внешней среды, температура магнитопровода не превысила 100 ºС для аморфных сплавов (серия MSSA) и 120 ºС для нанокристаллических (серия MSSN). На практике, так как количество витков обмотки обычно небольшое, а условия охлаждения хорошие (провод открыт), часто допустимы большие плотности тока в обмотке, превышающие в разы соответствующие значения для низкочастотных трансформаторов.
2.2. Выбор коэффициента заполнения окна магнитопровода.
Для наиболее распространённых размеров магнитопровода от 12 до 25 мм и диаметре провода от 0.7 до 1.4 мм коэффициент заполнения К обычно принимается равным 0.3. Для большего диаметра провода или при использовании многожильного провода лучше использовать величину К = 0.2.
2.3. Расчёт произведения площади окна на эффективную площадь сечения WaAc.
Aw – площадь сечения провода в см2;
Bm – магнитная индукция насыщения (максимальная) в Теслах;
Λ – вольт – секундная площадь задержки, В×сек.
2.4. Выбираем подходящий типоразмер магнитопровода по величине WaAc из таблицы 1.
Таблица 1
Тип | Габаритные размеры, мм (внешн. диам. – внутр. диам. – высота) | Длина средней линии Lm, (см) Эффект. | Сечение Ac, (см2) | Площадь окна Wa, (см2) | WaAc (см4) | Масса (г) | Параметры ПГ @ F=100 КГц, Нm=1Э (80 А/м), 25°С | ||
Полный поток 2Фm (мкВб) | Коэрцит. Сила Hc (А/м) | Коэфф. Прямоуг. Br/Bm (%) | |||||||
В контейнере | Номин. | Номин. | Номин. | Номин. | Номин. | ±13% | Max | Min | |
| MSSA-10S-L,N | 11.9-5.8-6.3 | 2.70 | 0.0474 | 0.264 | 0.0125 | 1.0 | 5.5 | 17 | 96 |
| MSSA-11A-L,N | 14.0-6.6-6,3 | 2.99 | 0.0374 | 0.342 | 0.0128 | 0.9 | 4.3 | ||
| MSSA-11S-L,N | 14.0-6.6-6,3 | 2.99 | 0.0562 | 0.342 | 0.0192 | 1.3 | 6.6 | ||
| MSSA- 12A-L,N | 14.0-6.6-4,8 | 3.10 | 0.0468 | 0.342 | 0.0160 | 1.1 | 5.4 | ||
| MSSA-10B-N | 11.2-5.7-5.7 | 2.59 | 0.0594 | 0.255 | 0.0151 | 1.2 | 6.9 | ||
| MSSA-13B-L,N | 14.7-7.8-5.1 | 3.48 | 0.0412 | 0.478 | 0.0197 | 1.1 | 4.8 | ||
| MSSA-15A-L,N | 16.7-10.5-6.3 | 4.22 | 0.0527 | 0.870 | 0.0458 | 1.7 | 6.1 | ||
| MSSA-15S-L,N | 16.9-8.6-6.5 | 3.87 | 0.09 | 0.785 | 0.0706 | 2.7 | 10.5 | ||
| MSSA-16A-L,N | 17.8-8.3-8.1 | 4.01 | 0.144 | 0.541 | 0.078 | 4.4 | 16.7 | ||
| MSSA-18S-L-N | 19.8-10.4-6.4 | 4.65 | 0.1053 | 0.849 | 0.0893 | 3.8 | 12.2 | ||
| MSSA-21S-L,N | 22.8-12.4-6.3 | 5.42 | 0.1229 | 1.207 | 0.148 | 5.1 | 14.3 | ||
| MSSA-19A-L,N | 21.6-11.0-7.9 | 4.98 | 0.1591 | 0.950 | 0.151 | 6.1 | 18.5 | ||
| MSSA-20A-L,N | 22.5-10.4-10.1 | 5.01 | 0.234 | 0.849 | 0.199 | 9.0 | 27.1 | ||
* Коэффициент прямоугольности Br/Bm @ 1 КГц, 80А/м: N – тип термообработки (86 %), L – тип (93%).
3.Расчёт требуемого числа витков обмотки.
Λ – вольт – секундная площадь, В×мкс;
2Фm – полный (двойной) поток из таблицы 1, мкВб;
0.87 – коэффициент, учитывающий разброс значений по потоку (-13%).
4. Расчёт потерь и перегрева.
Потери в дросселе магнитного усилителя состоят из потерь на перемагничивание магнитопровода и потерь на активном сопротивлении обмотки.
4.1. Для определения удельных потерь в магнитопроводе определяют величину амплитуды индукции частного цикла перемагничивания

B – амплитуда индукции, Тл;
Λ – вольт – секундная площадь, В×мкс;
N – число витков обмотки;
Ac – эффективная площадь сечения магнитопровода, см2.
Приблизительно удельные потери можно оценить по формулам, полученным методом аппроксимации и приведённым ниже, или взять из графиков на Рис.2 и Рис.3.
Для магнитопроводов серии MSSA-L (термообработка в продольном магнитном поле):

Pcm – удельные потери в магнитопроводе, Вт/кг;
f – частота, кГц;
B – амплитуда индукции, Тл.
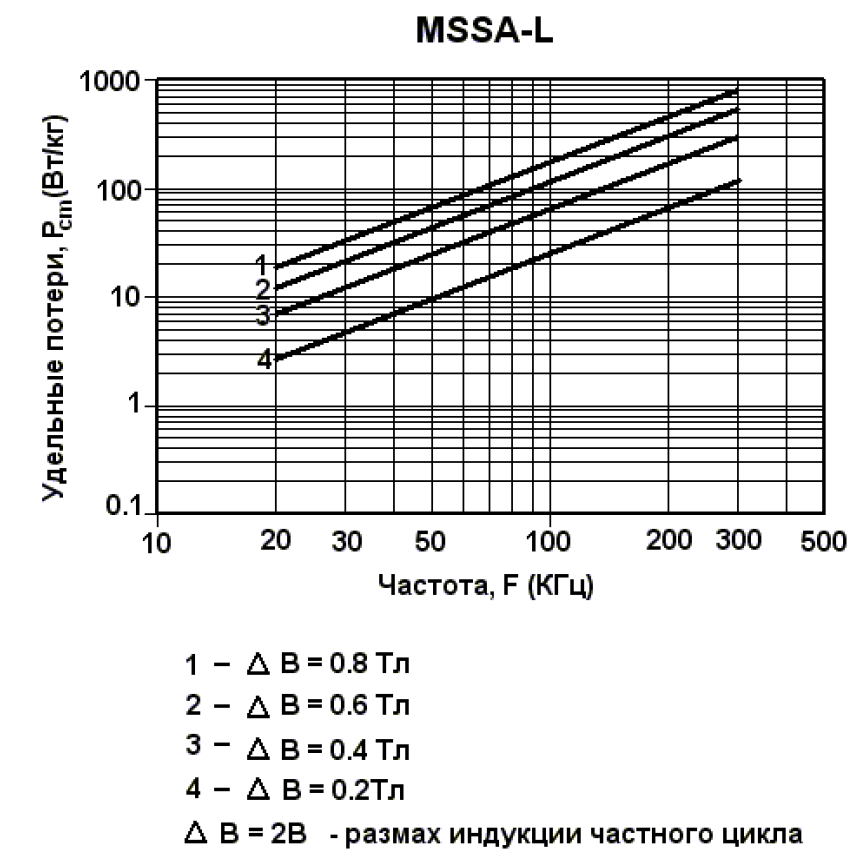
Рис.2. Магнитопроводы MSSA-L. Типовая зависимость потерь от частоты и амплитуды индукции.
Для магнитопроводов серии MSSA-N (термообработка без поля):

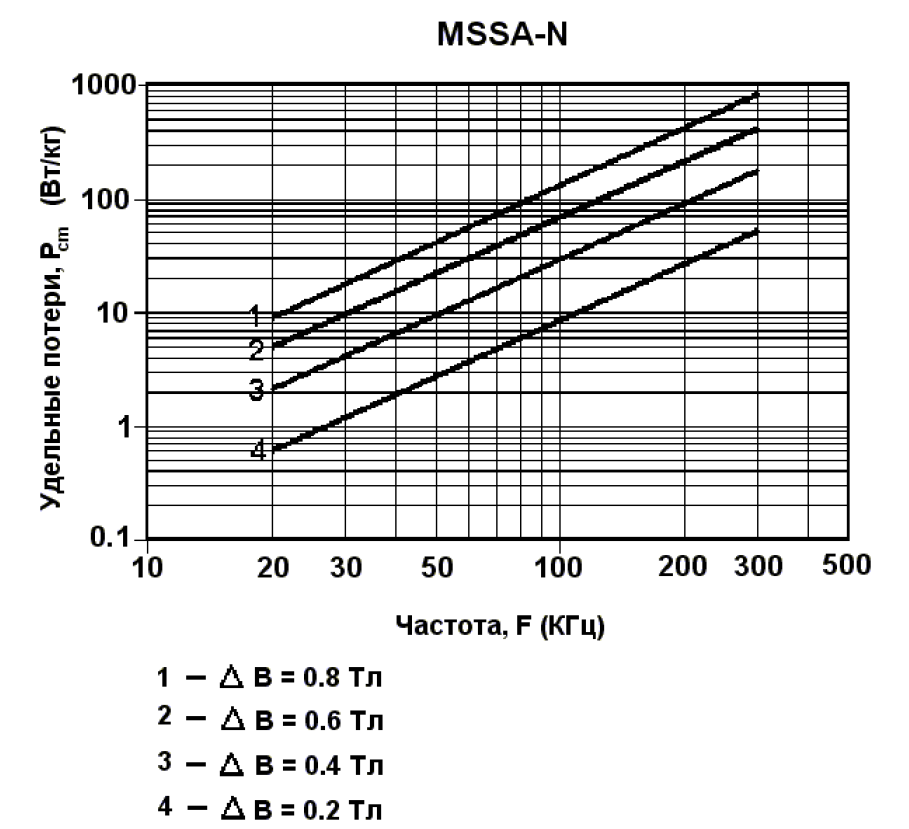
Рис.3. Магнитопроводы MSSA-N. Типовая зависимость потерь от частоты и амплитуды индукции.
После определения удельных потерь в Вт/кг, определяют величину потерь в магнитопроводе, умножив полученное значение удельных потерь на вес выбранного магнитопровода, взятый из табл.1.
Pс – потери, Вт;
m – масса магнитопровода, кг.
Для определения потерь в проводе сначала определяют длину провода и далее определяют его сопротивление через значение удельного сопротивления из табл.2. На высоких частотах сказывается скин-эффект. Для его учёта определяют величину
d – диаметр провода, см;
f – частота, кГц.
И далее по графику Рис.4 находят поправочный коэффициент Rac/Rdc.
Таблица 2
Типоразмер провода AWG | Диаметр см. | Площадь сечения см2×103 | Сопротивление на единицу длины, мОм/см | Допустимый ток, ma | |
20ºС | 100ºС | ||||
10 | 0.272 | 58.12 | 0.033 | 0.044 | 25960 |
11 | 0.2431 | 46.40 | 0.041 | 0.055 | 20565 |
12 | 0.2172 | 37.04 | 0.052 | 0.070 | 16323 |
13 | 0.1943 | 29.65 | 0.066 | 0.088 | 12960 |
14 | 0.1737 | 23.71 | 0.083 | 0.111 | 10275 |
15 | 0.1557 | 19.04 | 0.104 | 0.140 | 8150 |
16 | 0.1392 | 15.22 | 0.132 | 0.176 | 6450 |
17 | 0.125 | 12.27 | 0.166 | 0.222 | 5125 |
18 | 0.1118 | 9.810 | 0.209 | 0.280 | 4063 |
19 | 0.1003 | 7.905 | 0.264 | 0.353 | 3225 |
20 | 0.08966 | 6.314 | 0.333 | 0.445 | 2563 |
21 | 0.08062 | 5.092 | 0.420 | 0.561 | 2038 |
22 | 0.07216 | 4.089 | 0.530 | 0.708 | 1600 |
23 | 0.06476 | 3.294 | 0.668 | 0.892 | 1275 |
24 | 0.05814 | 2.655 | 0.842 | 1.125 | 1010 |
25 | 0.05230 | 2.148 | 1.062 | 1.419 | 801 |
26 | 0.04697 | 1.733 | 1.339 | 1.789 | 633 |
27 | 0.04189 | 1.378 | 1.689 | 2.256 | 504 |
28 | 0.03759 | 1.110 | 2.129 | 2.845 | 398 |
29 | 0.03408 | 0.9121 | 2.685 | 3.587 | 319 |
30 | 0.03048 | 0.7297 | 3.386 | 4.523 | 250 |
31 | 0.02747 | 0.5928 | 4.269 | 5.704 | 198 |
32 | 0.02489 | 0.4864 | 5.384 | 7.192 | 160 |
33 | 0.02235 | 0.3922 | 6.789 | 9.070 | 126 |
34 | 0.01981 | 0.3081 | 8.560 | 11.43 | 99 |
35 | 0.01778 | 0.2483 | 10.795 | 14.42 | 79 |
36 | 0.01600 | 0.2012 | 13.612 | 18.18 | 63 |
37 | 0.01448 | 0.1647 | 17.165 | 22.93 | 51 |
38 | 0.01295 | 0.1317 | 21.644 | 28.91 | 40 |
39 | 0.01142 | 0.1024 | 27.293 | 36.46 | 31 |
40 | 0.01016 | 0.0811 | 34.417 | 45.98 | 24 |
Rac – сопротивление провода переменному току;
Rdc – сопротивление провода постоянному току.
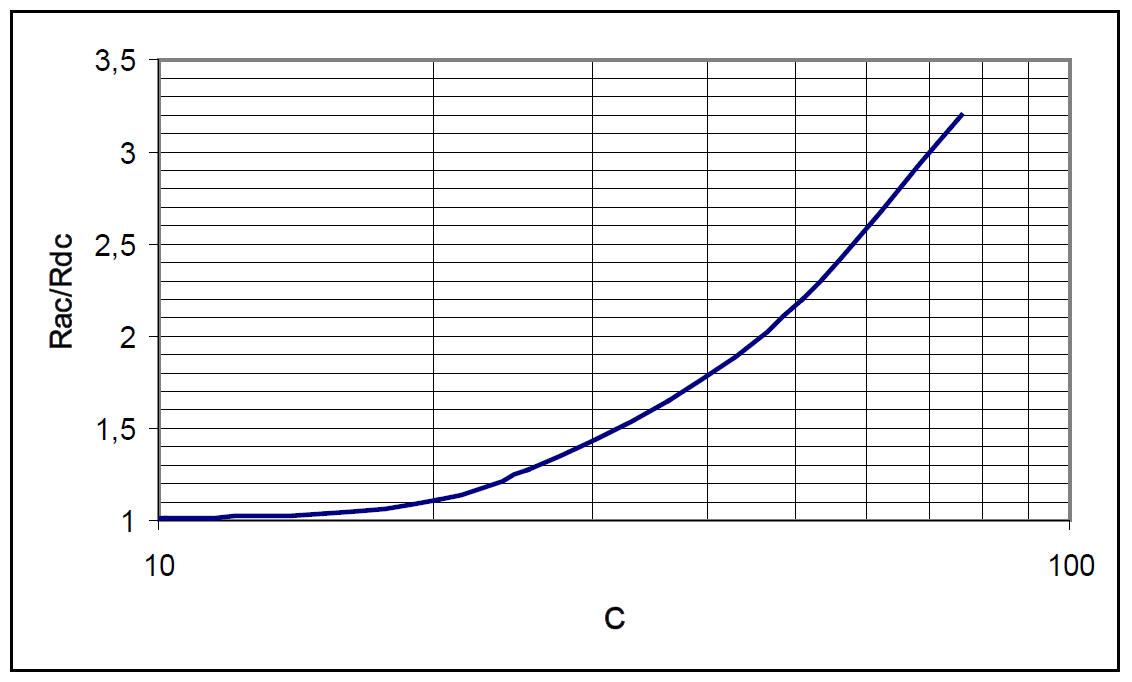
Рис.4 Поправочный коэффициент, учитывающий скин-эффект.
Далее определяют потери в обмотке

Pw – потери в обмотке;
Irms – средне квадратичное значение тока.

Iout – выходной ток, А;
D – отношение длительности импульса (на выходе дросселя магнитного усилителя) к периоду.
4.3 Далее считаются общие потери в дросселе
P – общие потери в дросселе, Вт.
Перегрев дросселя оценивается по формуле
А - площадь поверхности дросселя, см2.
Дроссель для расчёта площади поверхности упрощённо рассматривается как цилиндр с диаметром, равным диаметру магнитопровода + 2 толщины обмотки, и высотой, равной высоте магнитопровода + 2 толщины обмотки.
Проектирование схемы управления
На Рис.5 представлена одна из простейших и наиболее популярных схем, обеспечивающая очень стабильное выходное напряжение и минимальная по цене. Она рекомендуется в тех случаях, когда требуется только регулировка, когда минимальный ток нагрузки больше критического тока дросселя L2, и когда не требуется ограничение тока. В этом случае источник питания содержит устройство ограничения тока на первичной стороне, которое защищает все выходы вместе.
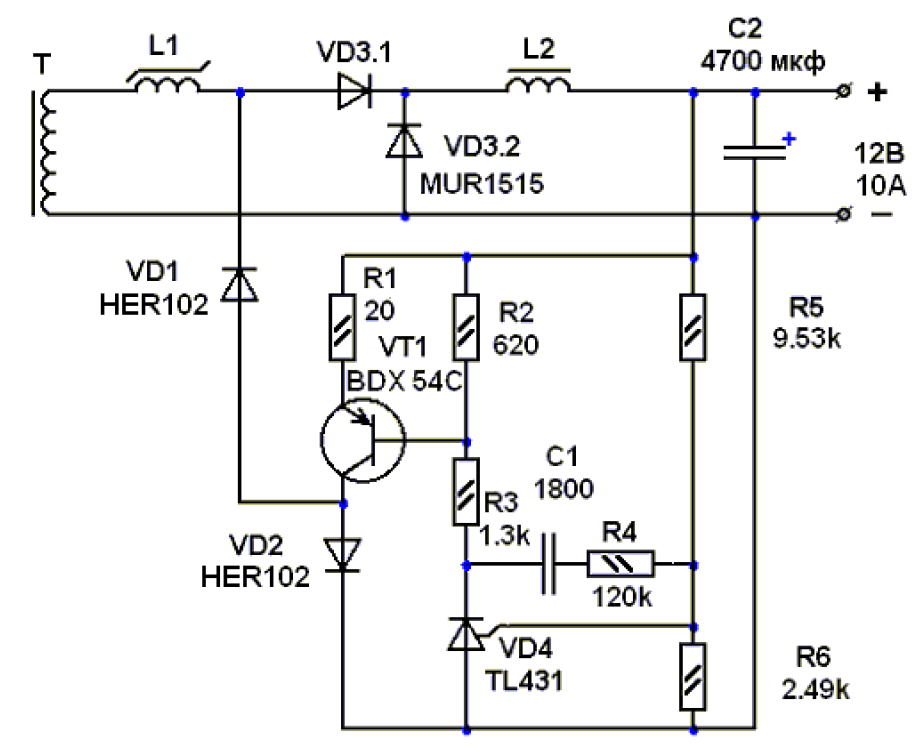
Рис.5 Пример схемы управления.
Назначение резистора R1 – сделать схему некритичной к изменениям коэффициента передачи по току транзистора VT1.
Резистор R1 выбирают так, чтобы при максимальном токе регулирования на нём падало напряжение 1 В.
Резистор R2 выбирают так, чтобы в нормальном режиме работы VT1 ток в цепи резистора R2 был по крайней мере, 1 мА (рекомендуется 2 мА). Ток анода VD4 не менее 1 мА требуется для обеспечения точного опорного уровня 2.5 В.
Резистор R3 выбирают так, чтобы на выходе усилителя ошибки поддерживалось напряжение, по крайней мере, на 3..4 В ниже напряжения питания усилителя. В данном случае, для TL431, это не критично, но для большинства универсальных ОУ падение напряжение на резисторах R2 и R3 должно быть не менее 4 В.
Основой схемы является регулируемый источник опорного напряжения TL431. Для обеспечения точного опорного уровня 2.5 В требуется ток анода не менее 1 мА. Делитель R5, R6 задаёт выходное напряжение, и выбирается таким образом
Резистор R6 выбирается так, чтобы ток через делитель был не менее 1 мА.
Отметим, что в данной конструкции R1, R2 и R5 привязаны к выходу регулятора. Это устраняет необходимость в отдельном источнике питания и значительно упрощает схему. Если магнитный усилитель выполняет функцию ограничения выходного тока, R1 и R2 должны быть привязаны к вспомогательному напряжению, обычно 12…15 В.
Элементы R4 и C1 выбирают для стабилизации петли обратной связи. Для этого:
1.Оценивают угловую частоту комбинации модулятор/фильтр.
Угловая частота фильтра:
Угловая частота комбинации модулятор/фильтр будет выше
G – усиление по постоянному току (обычно выбирается от 2 до 6). Выбрав среднее значение G = 4, частота будет сдвинута вверх коэффициентом (1+5)1/2 + 2,2 . Следовательно
2.Выбор коэффициента усиления усилителя обратной связи производится в соответствии с формулой
3.Отсюда выбирается величина R4
4.Далее рассчитывают величину C1
Это очень упрощённая процедура, которая обязательно должна уточняться на практике. Устойчивость петли обратной связи проверяют с помощью переключения нагрузки от половины к полной и наоборот. Для правильно спроектированной схемы при этом возникает возмущение выходного напряжения, которое восстанавливается экспоненциально в течение долей миллисекунды без значительного «звона».
Пример разработки
Для иллюстрации методики разработки произведём проектирование выходного регулятора магнитного усилителя с выходными параметрами: 12 В, 10А. Конфигурация схемы на Рис.5. Рабочая частота преобразователя – 100 кГц. Форма входного напряжения с выходной обмотки трансформатора – меандр с амплитудой 40 В. См. Рис. 6. Предполагается, что МУ не используется для ограничения выходного тока и для отключения выхода, а применяется только для стабилизации выходного напряжения при изменениях напряжения в сети и тока нагрузки.
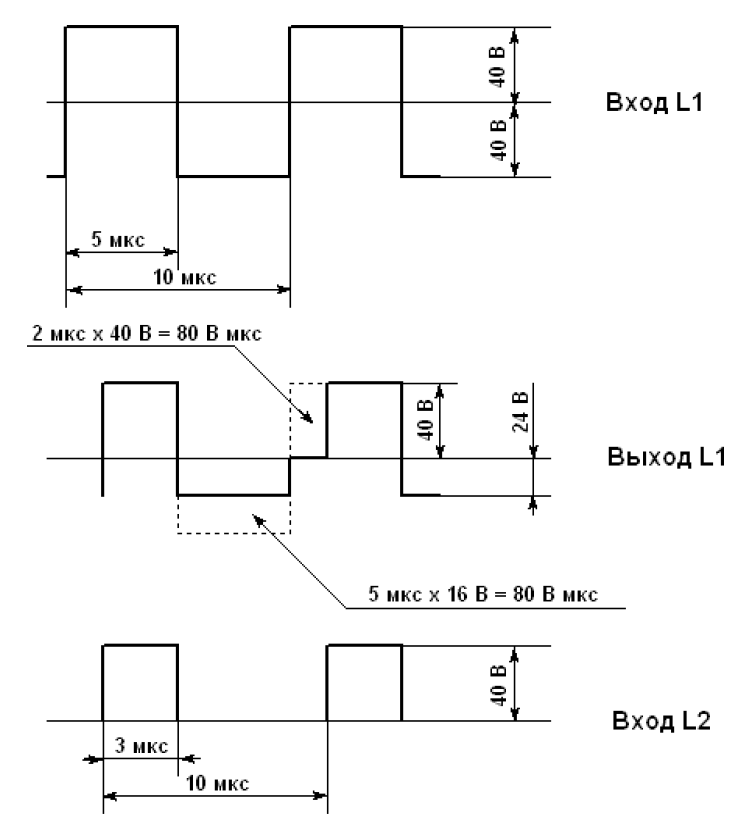
Рис. 6 Диаграммы напряжения для схемы Рис.4.
1. Определение вольт – секундной площади Λ, которую должен выдерживать дроссель, не входя в насыщение:
Чтобы найти максимальное время задержки t, нужно сначала найти длительность импульса τ на выходе дросселя L1.
Um – амплитуда импульса;
T – период.
Тогда
Отсюда максимальное время задержки переднего фронта импульса t = 5 мкс – 3 мкс = 2 мкс.
Тогда

2. Определение требуемой величины произведения WaAc магнитопровода:
Диаметр провода обмотки

Для американского ряда это соответствует 14AWG (1.74 мм) См. табл. 2. Для удобства намотки лучше взять провод вдвойне. При этом площадь сечения должна быть примерно та же. Это 17 AWG (1.25 мм).

Для провода диаметром 1.25 мм выбираем коэффициент заполнения окна К = 0.3.
Тогда

Bm = 0.56 Тл – минимальное значение амплитуды индукции для кобальтовых аморфных сплавов.
По таблице 1 выбираем магнитопровод, имеющий WaAc не менее полученного значения. Выбираем MSSA-18S-L, имеющий WaAc = 0.0893 см4. Величина двойного потока (при T=25º C) 2Фm = 12.2 мквб.
3. Число витков обмотки

4. Размах индукции частного цикла

5. Потери в магнитопроводе

6. Потери в обмотке
По геометрическим размерам магнитопровода определяем длину провода одного витка и далее, умножая на число витков, получаем длину провода обмотки. Для данного типоразмера магнитопровода размеры в контейнере 19.8 – 10.4 – 6.4. Длина витка l = 1.2(2×4.7+2×6.4) = 26.64 мм = 2.7 см. (Иногда проще и точнее получить это значение экспериментально). Для десятивитковой обмотки длина провода L = 27 см.
Для учёта скин-эффекта определим

По графику Рис.3 определим Rac/Rdc = 1.8
Сопротивление обмотки в два провода 17 AWG на частоте 100 кГц при температуре 100ºС:

Потери в обмотке

Общие потери

7. Определение перегрева
Для расчёта поверхность дросселя с учётом обмотки рассматривают как цилиндр диаметром 19.8 + 2×1.25 = 22.3 мм = 2.23 см и высотой 6.4 + 2×1.25 = 8.9 мм = 0.89 см (обмотка для упрощения рассматривается как однослойная).
Площадь поверхности

Перегрев дросселя

Это значение можно уменьшить методом последовательных приближений, как показано ниже. Изменяя в небольших пределах диаметр провода и число витков, ищут оптимум по минимуму ∆T.
8. Определение тока управления

Ac = 0.1053 см2 – эффективная площадь сечения магнитопровода из табл.1.

Lm = 4.65 см - длина средней линии магнитопровода из табл.1
Проанализировав полученные результаты, делаем следующие выводы:
- Ток управления немного высок – возникнет излишнее выделение тепла на возвратном транзисторе.
- Потери в магнитопроводе высоки и значительно превышают потери в обмотке.
- Возможно, число витков обмотки можно увеличить, чтобы снизить индукцию (для снижения потерь в магнитопроводе и снижения тока управления).
Так как потери в обмотке малы по сравнению с потерями в магнитопроводе, можно уменьшить диаметр провода и за счёт этого увеличить число витков.
Выберем провод 18 AWG (1.1 мм). Площадь поперечного сечения двух проводников равна:

Максимальное число витков, исходя из коэффициента заполнения K = 0.3, будет:

Новая магнитная индукция равна:
Таким образом, для нашего примера мы имеем:
9. Выбор возвратного транзистора
Максимальное напряжение коллектора определяется суммой выходного напряжения (12 В) и амплитуды импульса (40 В) и для нашего примера должно быть не ниже 60 В. Коэффициент усиления по току должен быть высоким, чтобы коэффициент усиления петли ОС не зависел от транзистора. Мощность, выделяемая транзистором, оценивается как произведение тока управление на среднее напряжение коллектор - эмиттер. В течение половины периода, т.е. 5 мкс, когда напряжение на выходе L1 отрицательно, напряжение на коллекторе - 40 + 16 = - 24 В. Напряжение на эмиттере +12 В. Напряжение на переходе коллектор-эмиттер будет 36 В. Во время оставшейся части периода коллектор заземлён через диод VD2. Напряжение на переходе коллектор-эмиттер будет 12 В. Среднее по периоду напряжение на переходе коллектор-эмиттер (24+12)/2 = 18 В. Мощность, выделяемая транзистором, равна 38 мА×18 В = 684 мВт. По этим данным выбираем недорогой транзистор BDX 54C, имеющий максимальное напряжение коллектор – эмиттер 100 В, h21Э не менее 750, корпус: TO-220AB.
10. Выбор резистора эмиттера R1
11. Выбор R2
12. Выбор R3

В этом случае используют напряжение насыщения база-эмиттер VBE SAT, оно выше VBE.
13. Выбор R6 и R5
14. Расчёт угловой частоты комбинации модулятор/фильтр
Величина индуктивности выходного дросселя L2 обычно рассчитывается по формуле
Величину Imin обычно выбирают как 10% от максимального выходного тока, т.е. в данном случае 1 А.

Конденсатор выходного фильтра С2 выбирают так, чтобы он обеспечивал достаточно низкий импеданс на частоте пульсаций, для обеспечения размаха пульсаций на выходе устройства не более заданного. В нашем случае для обеспечения размаха пульсаций менее 100 мВ (амплитуда 50 мВ).
Импеданс конденсатора С2
Для алюминиевых электролитических конденсаторов значение ESR доминирует над импедансом. Исходя из этих соображений, в нашем случае выбран номинал 4700 мкФ, 16 В.

15. Расчёт коэффициента усиления усилителя обратной связи
16. Расчёт R4

17. Расчёт С1

Варианты схем управления
Кроме приведённого варианта на TL431, усилитель обратной связи можно выполнить на универсальных операционных усилителях. Для их использования потребуется дополнительное питание (обычно 15 В). Существуют и специализированные контроллеры магнитных усилителей, например UC3838A, LPR30, UC19431 и другие. Информацию по применению таких контроллеров можно найти на сайте производителя. Как иллюстрацию привожу типовую схему включения контроллера UC3838A (Рис.7), позволяющую обеспечить управление и по току и по напряжению.
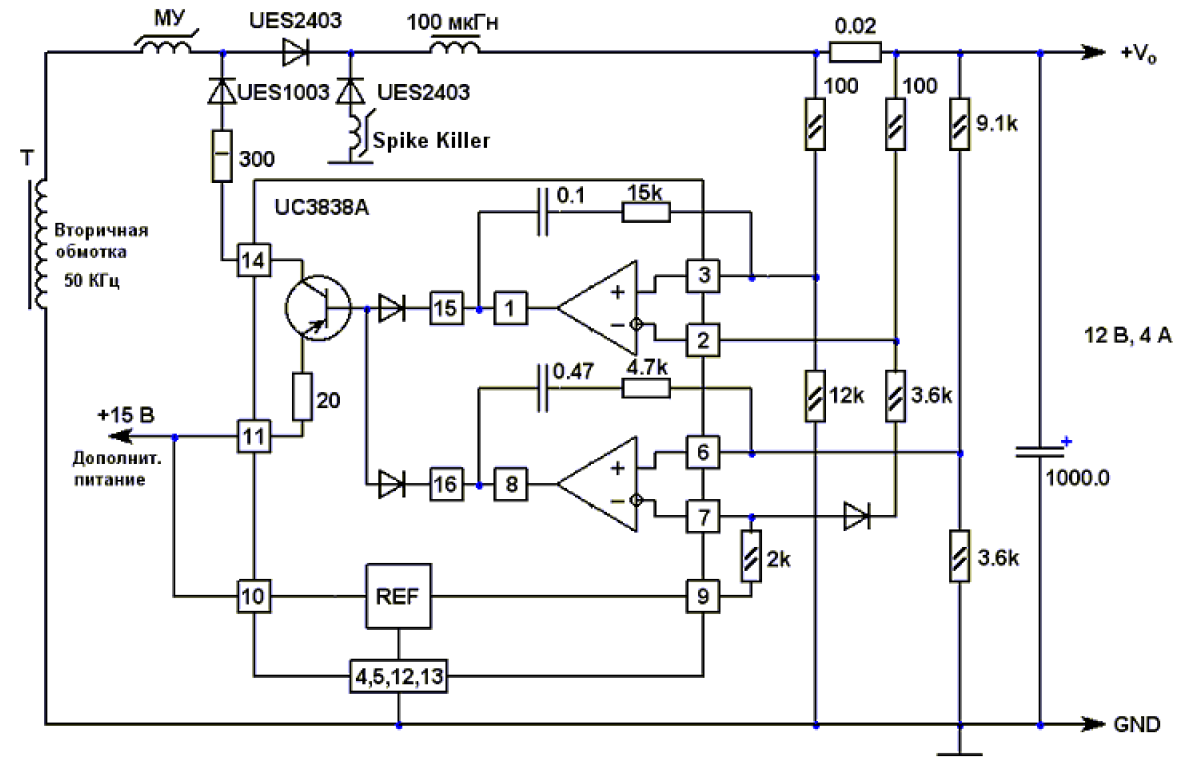
Рис. 7. Типовая схема применения контроллера магнитного усилителя UC3838A.
При выборе силовых высокочастотных выпрямительных диодов, если применяются диоды Шоттки, следует особо обратить внимание на величину их максимального обратного тока. Величина обратного тока должна быть на порядок меньше тока управления. Многие диоды Шоттки, особенно низковольтные, имеют значительные обратные токи, и их применение может привести к сужению диапазона регулирования (обратный ток утечки диода VD3.1 на Рис.5 суммируется с током управления). Заметим, что в схемах с МУ не требуются классические демпферные RC цепочки, включаемые параллельно силовым выпрямительным диодам. Сам дроссель МУ эффективно блокирует возникновение высокочастотных колебаний, связанных с конечным временем восстановления диодов. На вывод второго диода надевается миниатюрный помехоподавляющий магнитопровод (amobead), образующий последовательный одновитковый дроссель, или последовательно с диодом включается дополнительно многовитковый помехоподавляющий магнитопровод (Spike Killer) с обмоткой в несколько витков. О применении этих изделий писалось в журнале «Радио №2 за 2003г.» Информация эта есть также на сайте на страничке «Помехоподавляющие магнитопроводы\применение».
В результате последних достижений технологии быстрого охлаждения расплавов появилась новая серия нанокристаллических магнитопроводов MSSN, отличающаяся повышенной индукцией (1.2 Тл), более высокой рабочей температурой (120 ºС), лучшей температурной стабильностью и меньшей ценой. За счёт высокой индукции возможно уменьшение размеров дросселей насыщения. Эта серия может быть более оптимальным выбором по критерию цена/качество, особенно на не слишком высоких частотах. Порядок расчёта дросселей МУ на основе этой серии в целом такой же, но данные нужно взять из таблицы 3.
Таблица 3
Тип | Габаритные размеры, мм (внешн. диам. – внутр. диам. – высота) | Длина средней линии Lm, (cм) | Эффект. Сечение Ac, (см2) | Площадь окна Wa, (см2) | WaAc (см4) | Масса (г) | Параметры ПГ @ F=100 КГц, Нm=1Э (80 А/м), 25°С | ||
Полный поток 2Фm (мкВб) | Коэрцит. сила Hc (А/м) | Коэфф. прямоуг. Br/Bm (%) | |||||||
В контейнере | Номин. | Номин. | Номин. | Номин. | Номин. | ±13% | Max | Min | |
| MSSN-10В-L | 11.9-5.8-6.3 | 26.39 | 0.0562 | 0.26 | 0.0146 | 1.09 | 13.5 | 35.0 | 97 |
| MSSN-11S-L | 14.0-6.6-6.3 | 29.85 | 0.0527 | 0.34 | 0.0179 | 1.15 | 12.6 | ||
| MSSN-13В-L | 14.7-7.8-5.1 | 35.03 | 0.0412 | 0.49 | 0.020 | 1.06 | 9.9 | ||
| MSSN-15S-L | 16.9-8.6-6.5 | 46.18 | 0.0880 | 0.59 | 0.052 | 2.53 | 21.1 | ||
| MSSN-18S-L | 19.8-10.4-6.4 | 46.18 | 0.0948 | 0.85 | 0.080 | 3.22 | 22.7 | ||
Значение потерь в магнитопроводе Pc можно взять из соответствующих графиков (Рис. 8) зависимости потерь от частоты и амплитуды индукции, или определить по приближённой формуле:

Pс – удельные потери, Вт/кг;
∆B = 2B – размах индукции частного цикла, Тл;
f – частота преобразователя, КГц.
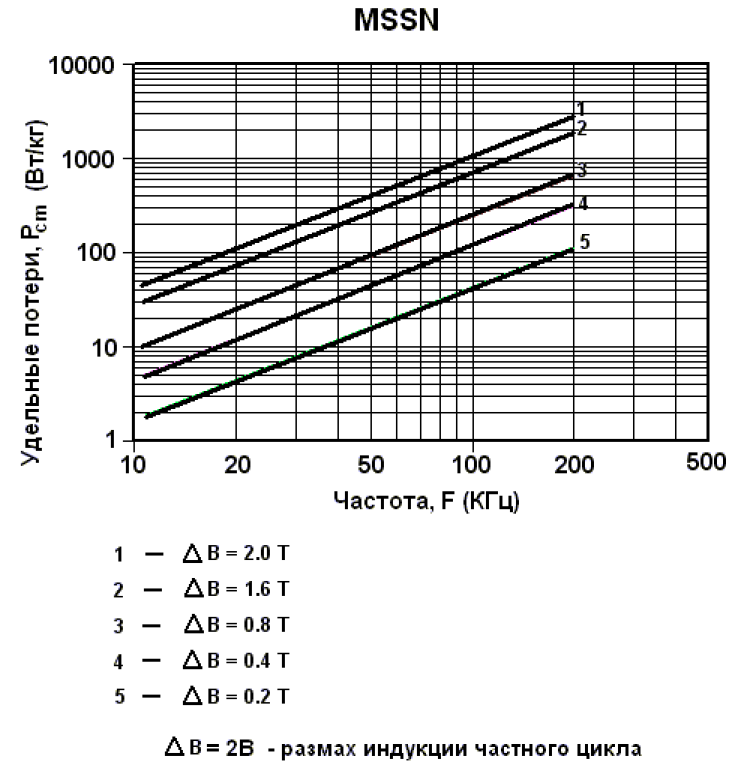
Рис. 8. Магнитопроводы MSSN. Типовая зависимость удельных потерь (Pcm) от частоты и амплитуды индукции.
Указанная методика расчёта требует обязательного уточнения экспериментальным путём.
Э.Фоченков, edf01@yandex.ru